Shaoxiong (Shawn) Wang
Member of Technical Staff @ Tacta
Email: wsxiong [at] gmail (dot) com
Google
Scholar
/
CV
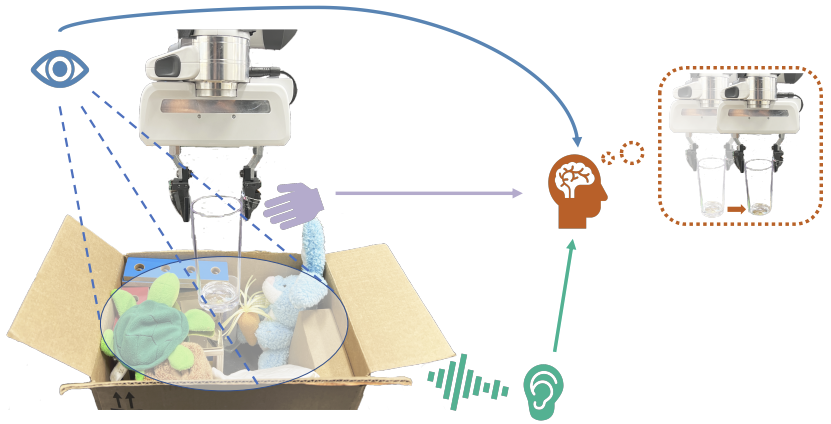
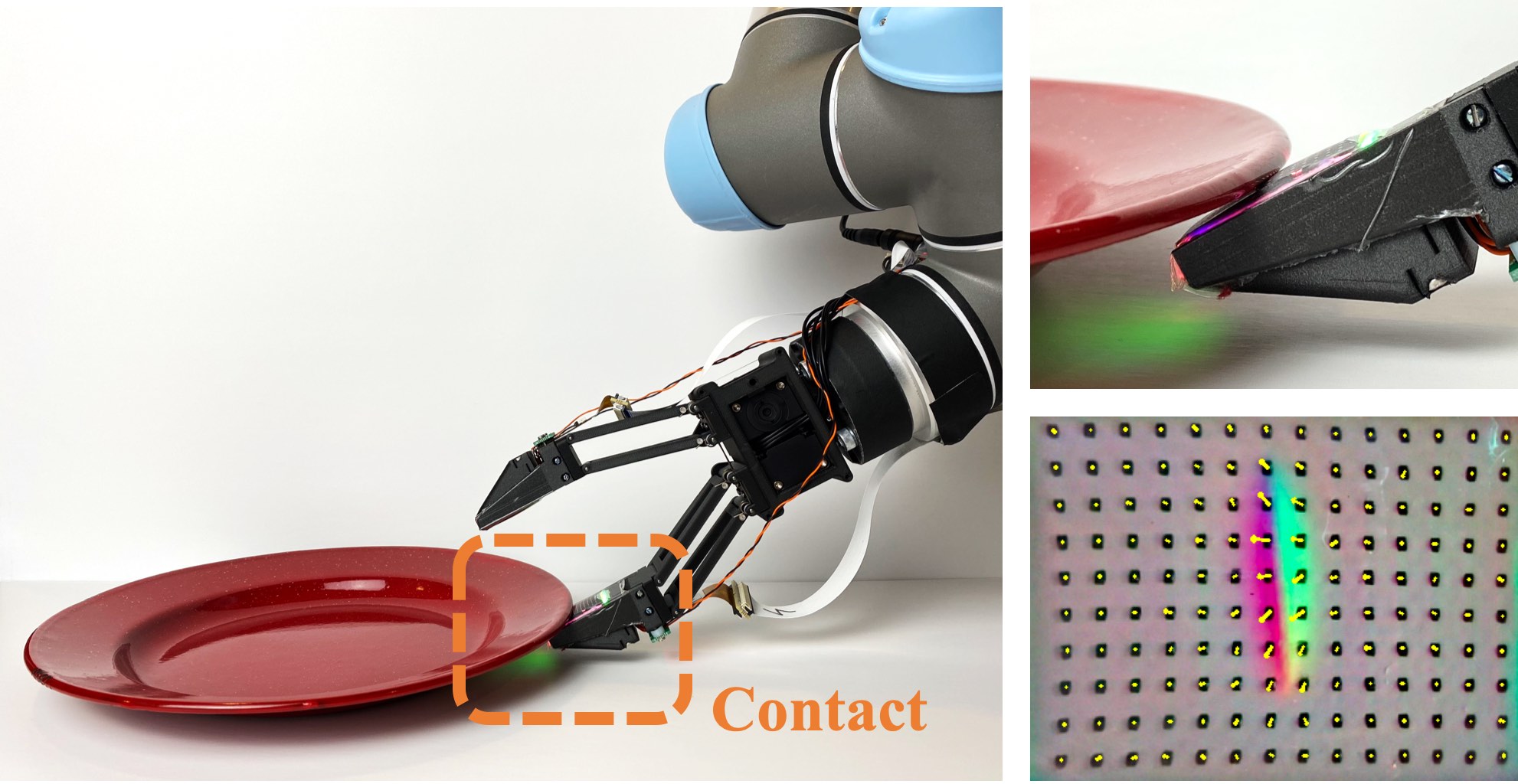
I work on Contact-Rich Manipulation at Tacta, a robotics startup in the Bay area, focusing on Tactile Sensing and Dexterous Manipulation.
I finished my Ph.D. in the Computer Science and Artificial Intelligence Laboratory (CSAIL) at Massachusetts Institute of Technology (MIT) supervised by Prof. Edward H. Adelson. I also had the opportunity to work with Prof. Alberto Rodriguez. I recieved my B.E. degree from Department of Computer Science and Technology, Tsinghua University.
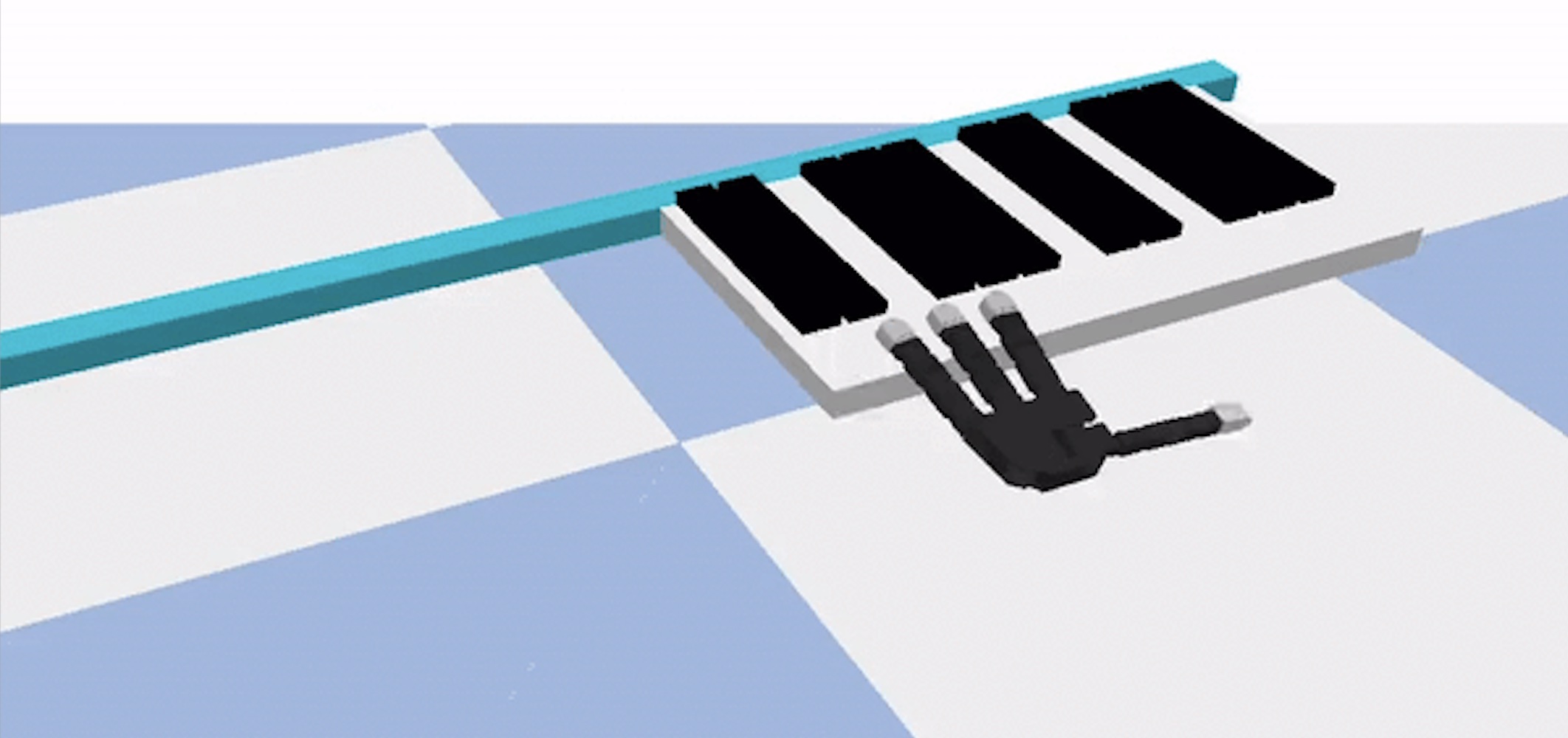
During Ph.D., I studied Tactile Perception & Manipulation, Computer Vision, and Machine Learning.
Previously, I was fortunate to work in Knowledge Engineering Group, Tsinghua University, advised by Prof. Jie Tang; Facebook AI Research, advised by Prof. Roberto Calandra.